
Camera Localisation and Tracking for Visually Navigated Bronchoscopy
- Typ:Masterarbeit
- Betreuung:
-
Motivation
A vision-based bronchoscopic navigation system helps physicians locate the bronchoscope during the endobronchial inspection and diagnostic procedures by applying video-CT registration techniques and works like a GPS system. However, the bronchoscopic video-CT registration is still challenging due to the feature-poor scene, occlusions, image artefacts and patients’ coughing. To suppress the influences of these challenging factors, improvements in registra-tion methods (e.g., 3D-3D registration methods which register the reconstructed 3D airway structure based on depth estimation to the preprocedural 3D CT model, 2D-2D registration methods which register the real bronchoscopic video to the bronchoscopic video rendered from the pre procedural 3D CT model) should be made.
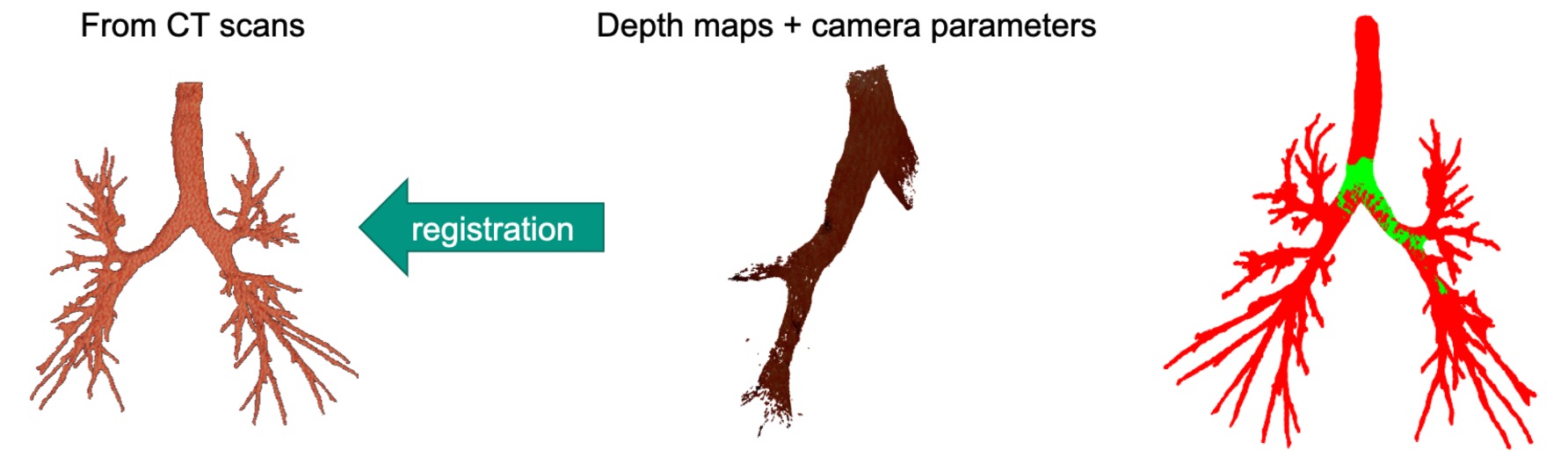
Fig. Example of 3D-3D registration of reconstructed airway structure based on depth es-timation to 3D CT model using ICP
Project Description
The goal of this work is to localise the bronchoscope camera with regard to pre-procudural CTs based on bronchoscopic camera views. The scope of the work includes:
- Literature research on vision-based bronchoscopic navigation and video CT registration methods
- Compare 2D-2D registration and 3D-3D registration methods in the con-text of bronchoscopic navigation (e.g. learning-based approaches)
- Develop a validation approach applied on clinical data
With this project, you will try to answer the following questions:
- What are the requirements of camera localisation in visually navigated bronchoscopy?
- Which state-of-the-art registration method outperforms when applied to visually navigated bronchoscopy? What could be further improved to en-hance the registration performance?
- What are the limitations for 2D-2D registration/ 3D-3D registration ap-proaches when applied to visually navigated bronchoscopy?
- How to validate the approach on clinical data?
If you are interested or have any questions, please get in touch!