
Deformable dynamic lung model for surgical simulation and navigation
- Forschungsthema:Medizinische Bildgebung für Modellierung und Simulation
- Typ:Masterarbeit
- Betreuung:
-
Motivation
In recent years, the demand for surgical simulation has grown rapidly, demonstrating significant benefits in training, preoperative planning, and intraoperative navigation. However, a major challenge in intraoperative guidance is the ability to model the real-time deformation of soft tissues, particularly the lungs, which undergo continuous shape changes due to respiration and surgical manipulation. To address this, the Finite Element Method (FEM) provides a powerful framework for simulating deformable structures with high accuracy. SOFA, an open-source framework designed for interactive mechanical simulation, has been widely used in biomechanics and surgical robotics, making it a strong candidate for developing dynamic, patient-specific lung models. By integrating real-time deformation simulations into intraoperative navigation systems, this research could enable more precise surgical guidance, reducing risks and improving patient outcomes.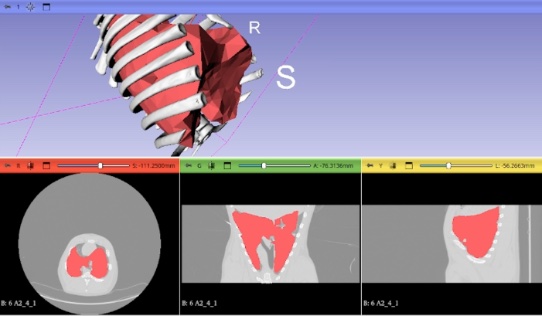
Task
This thesis aims to explore SOFA framework tools to create reliable lung simulations that can enhance surgical simulation and navigation, paving the way for more advanced and personalized medical interventions.
• Extracting lung model from CT
• Integration of Sofa with 3DSlicer
• Creating lung model that can mimic breathing motion
• Validation with real patient data
Requirements
• Python coding
Good to have
• Experience with 3DSlicer
• C++
• Mechanical modelling basics
References: https://onlinelibrary.wiley.com/doi/10.1111/aor.14632