
Dynamic Path Planning for Neurosurgical Navigation
- Forschungsthema:Medizinische Bildgebung für Modellierung und Simulation
- Typ:Masterarbeit
- Betreuung:
-
Motivation
Neurosurgical procedures require precise and efficient navigation to access deep-seated brain structures while minimizing damage to surrounding tissue. Traditional surgical navigation relies on preoperative imaging and static planning, which may not fully capture the complexities of real-time surgical conditions. Accurate path planning is crucial to optimizing tool trajectories, reducing invasiveness, and improving patient outcomes. This research aims to develop an advanced path planning algorithm for neurosurgery for steerable catheter. By enhancing navigation precision and adaptability, the proposed system will support neurosurgeons in performing safer and more efficient interventions. This work contributes to the advancement of computer-assisted neurosurgery, enabling more accurate targeting of brain structures and reducing the risk of complications during complex surgical procedures.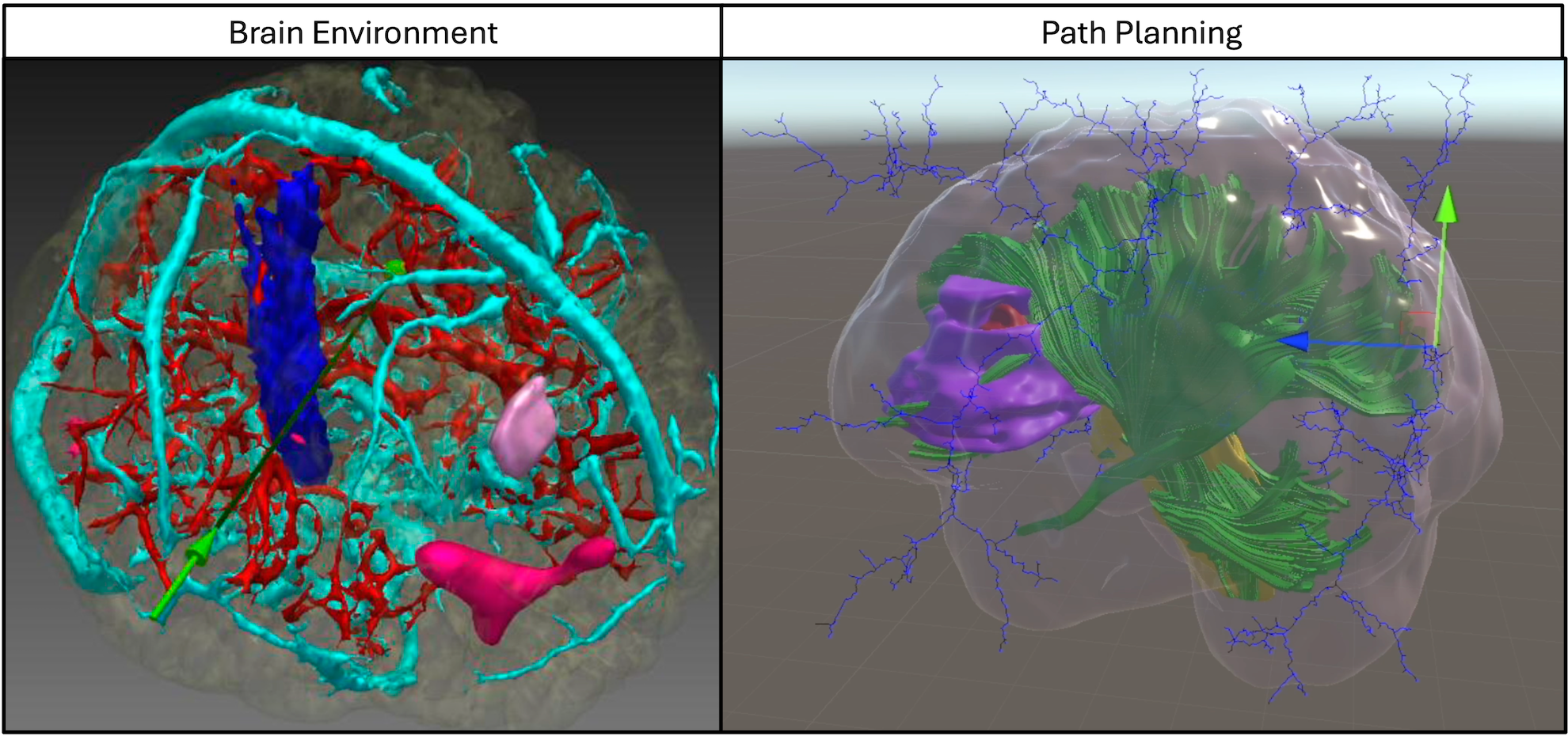
Task
• Environment setup
• Path planning algorithm investigation and implementation
• Constraint implementation
• Optimization
• Performance comparison
Requirements
• C# (or python)
Good to have
• Unity 3D (or 3D Slicer)References: https://ieeexplore.ieee.org/abstract/document/9645357