
Path Planning for Bronchoscope in Dynamic Environment
- Forschungsthema:Medizinische Bildgebung für Modellierung und Simulation
- Typ:Bachelor- oder Masterarbeit
- Betreuung:
-
Motivation
Bronchoscopy is a crucial procedure in pulmonary medicine, enabling both diagnosis and treatment of airway-related conditions. However, traditional navigation methods often rely on preoperative static imaging, failing to account for dynamic anatomical changes caused by respiration and patient movement. This limitation increases the risk of misnavigation, tissue damage, and extended procedure time. To enhance safety and accuracy, it is essential to develop a dynamic path planning algorithm that adapts in real-time to airway deformations. By integrating 4D imaging, real-time sensor feedback, and augmented reality guidance, this research aims to create an intelligent navigation system for bronchoscopes. The proposed solution will improve procedural efficiency, reduce complications, and contribute to the advancement of computer-assisted interventions, making bronchoscopy safer and more effective for both patients and physicians.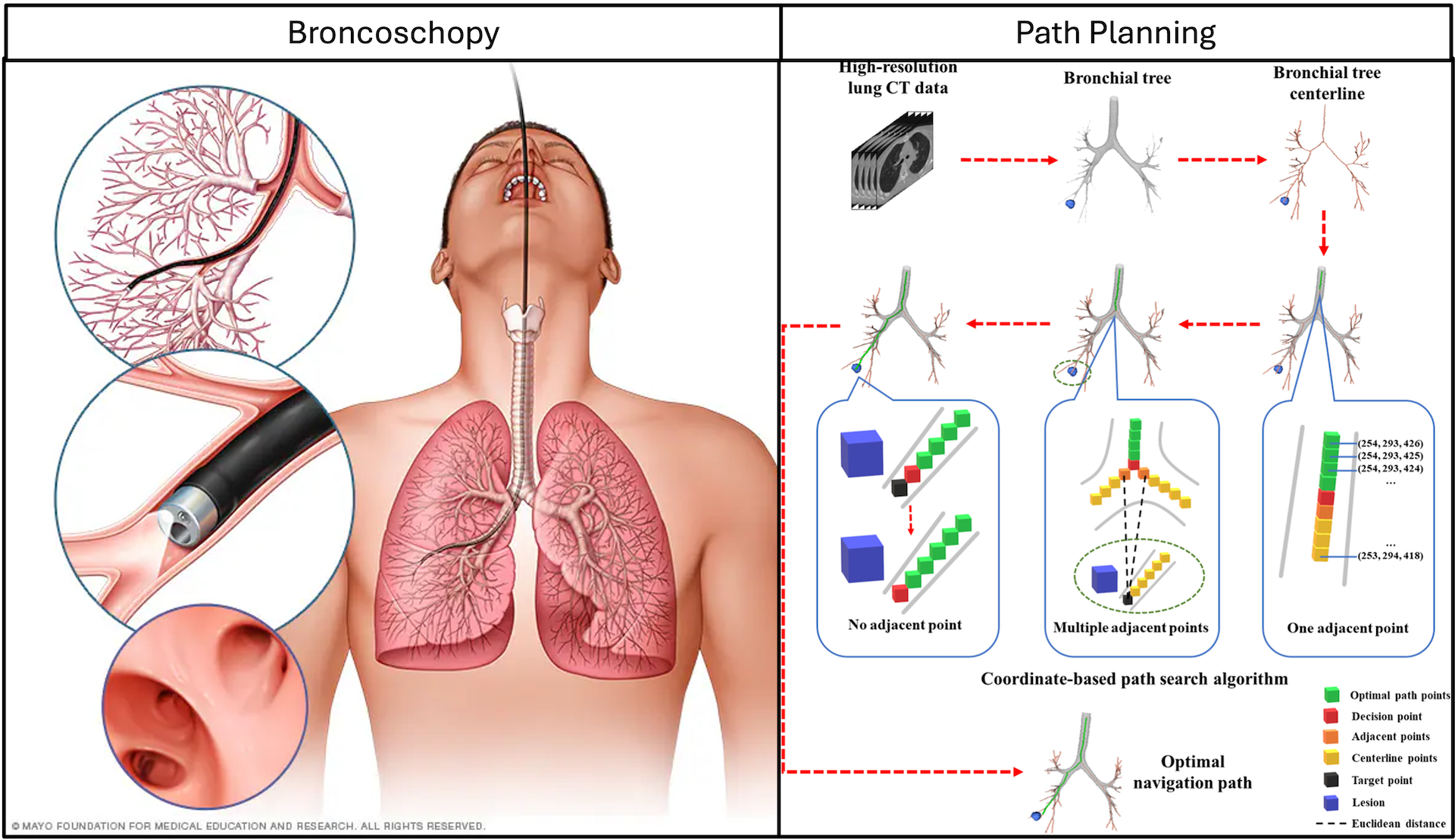
Task
• Dynamic environment setup
• Path planning algorithm investigation and implementation
• Constraint implementation
• Optimization
• Performance comparison
Requirements
• C# (or python)References: https://link.springer.com/article/10.1007/s11517-022-02740-8