
Deformable model simulation and validation with SOFA
- chair:Modelling and Simulation
- type:Student research project
- tutor:
-
Motivation
Surgical simulation has become increasingly popular in recent years for many reasons, ranging from training new surgeons to surgical planning. With the advent of augmented reality (AR), surgical simulations can also be developed for intra-operative guidance and navigation to improve outcomes and minimise risks. AR guidance is already being used in surgical fields where static models are sufficient, such as orthopaedics and neurosurgery. The development of deformable organs and tissues is of major interest to bring AR technology to other surgical fields where non-rigid interactions take place, such as laparoscopy and other minimally invasive surgeries.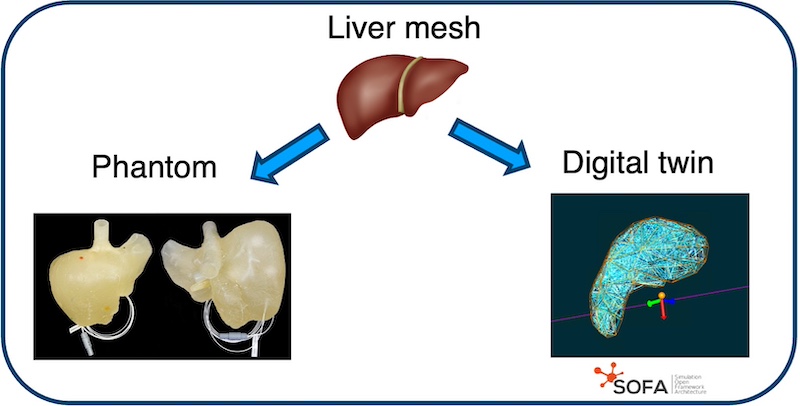
Task
The primary task of this HiWi position is to design and construct a silicone phantom that replicates the anatomical structure of a liver. In parallel, you will develop its digital twin using the SOFA Framework, an open-source platform dedicated to real-time physical simulation. The aim is to thoroughly explore the possibilities offered by this software, particularly in simulating deformable objects like human organs, creating an interactable digital twin that can realistically reproduce interactions with the physical phantom. This project will not only increase our understanding of the SOFA Framework’s capabilities but also contribute to advancements in augmented reality applications in surgery.Skills required
• Python programming
• SOFA Framework experienceGood to have / to know
• C-make experience (on windows)
• Mechanical modelling